Trace issue de la fusion de portion de traces

Bonsoir,
Visiblement LAND se prend les pieds dans le tapis lorsqu'il calcule le paramètre vitesse d'une trace obtenue par l'union de morceaux de traces enregistrées sur un parcourt correctement suivi.
Normalement un GPS est capable d'extraire la vitesse du signal reçu des satellites. Cependant le paramétré vitesse n'existe pas dans format d'un fichier GPX, pour le TRK je n'ai pas encore regardé. J'en déduit peut être a tort que la vitesses associée a une trace serait la dérivée de la distance d'ou effectivement certaines incohérences.
Bien cordialement
Thierry
-

Que ce soit en GPX ou en TRK, il n'y a pas de valeurs correspondant à des éléments qui peuvent être obtenus avec les autres valeurs enregistrées. La vitesse est obtenue avec la distance, obtenue elle par les coordonnées de points, divisée par le temps enregistré, donc pas enregistrée depuis le GPS. Il en est de même pour la distance totale et le dénivelé.
Il faudrait donc voir comment les temps des deux portions de traces qui ont été unies sont enregistrés. Si c'est fait dans la foulée, cela devrait marcher, si c'est très différent, normal que Land se plante un peu.
Cordialement
R. Burnet
-
Bonjour,
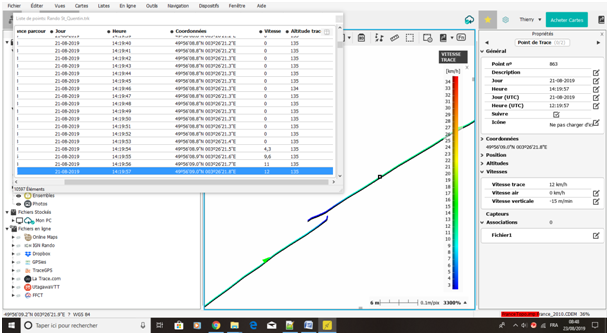
La réponse est dans l'image ci-dessous.
J'ai fait cette manip qui a consisté à interrompre puis relancer le suivi de "ROUTE" puis une seconde fois a " couper le GPS" et le re démarré dans la foulée pour comprendre une remarque faite sur ce forum.
J'ai obtenu ce que je cherchais, le figeage de l"écran et la perte du guidage, cependant l'enregistrement de la trace se poursuit correctement.
Au retour la trace totale est obtenue par union des traces partielle, elle est correcte sauf pour la vitesse qui est totalement farfelue: 31 432Km/h... Pour une moyenne réelle d'environ 18,5Km/h hors temps d'arrêt et 17.3 km/h en intégrant les temps d'arrêt.
Ont voit dans l'image ci dessous l'erreur d'union des traces, ce qui implique pour un logiciel qui parcourt les lignes du fichier une a une , un retour en arrière a vitesse nulle!
Donc pour obtenir quelque chose de "propre" il faudrait certainement, commencer par éliminer pour chaque trace partielle les points de début et de fin a vitesse nulle puis les points aberrants avant d'unir ces traces.
Cela dit en théorie pour obtenir la vitesse moyenne il aurait suffit de faire "Distance totale / Temps de parcourt" , visiblement l’algorithme mis en oeuvre par LAND est un peu plus complexe!
Une hypothèse est que cet algorithme élabore une "moyenne des vitesses partielles entre deux points de trace". Partant de la il y a la mauvaise solution qui consisterai a "dériver" les distances entre chaque point... Et la bonne qui consisterai a exploiter la vitesse du messages NMEA VTG ou RMC envoyé par la puce du GPS au logiciel TWO NAV , cette vitesse étant précise.
Il ne semble pas y avoir dans le fichier *.trk un champ renseigné par une quelconque vitesse dans le format trk ce qui est fort dommage.
J'ai déposée un dossier au SAV pour que l'algo d'union des traces soit amélioré
Bien cordialement
Thierry

-

Bonjour,
Pour "nettoyer" votre trace, Clic droit sur la trace, Outils, Définir le temps et la vitesse, et entrez une vitesse.
Cela améliorera la trace pour une utilisation future. (Mis à part cette marche arrière inexpliquée).
Je ne comprends pas cette "marche arrière". Si vous avez continuer à avancer tout en coupant puis relançant votre GPS, il devrait y avoir un "trou" et non une marche arrière et, en plus, la reprise n'est pas en ligne avec la 1ère trace. On pourrait supposer que le GPS avait, à son 2ème démarrage mal acquit sa position et a placer des points "comme il a cru déterminer" mais faux.
Malheureusement, on ne voit pas sur les traces affichées le N° des points correspondants à la fenêtre liste de points (pas de N°, non plus).
De même, si vous étiez stoppé lors de l'arrêt et du redémarrage: il n'y aurait pas eu de trou et, en principe, pas de marche arrière... les 2 traces auraient été dans le même prolongement sauf si le GPS n'avait une position sure.
Les écritures de l'image sont difficilement lisibles...
Cordialement
Laurent
Bitte melden Sie sich an, um einen Kommentar zu hinterlassen.
Kommentare
3 Kommentare