Calcul de pente (instantanée) incohérent

Bonjour,
Le sujet a été évoqué par Thierry C. dans d'autres discussions, à savoir des calculs de pente apparement (manifestement) aberrants sur certaines traces enregistrées.
Je n'utilise pas habituellement cette fonctionnalité (ni dans Land, ni en instantané sur le GPS), mais j'ai voulu voir par curiosité.
En préambule, il faut dire que je n'utilise le GPS que pour de la randonnée en général. En randonnée, la pente reste inférieure à (très environ) 50%, mais ponctuellement, en particulier en montagne, elle peut être bien supérieure (passages raides, équipés de cables, type via-ferrata, ...). Mais dans ce cas, si la pente est très élevée, cela s'accompagne obligatoirement d'une variation d'altitude qui doit être visible sur la trace enregistrée.
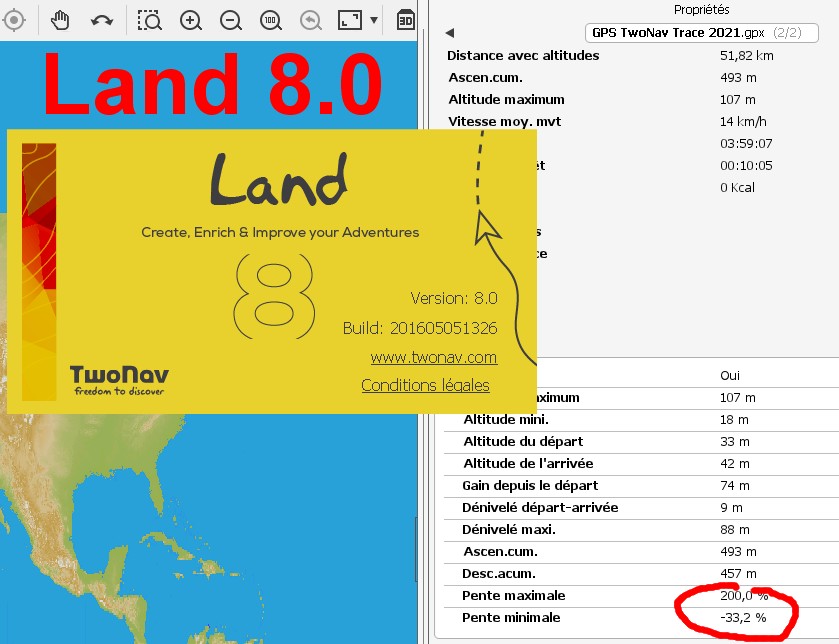
J'ai donc regardé ce que montre les graphiques comparés avec l'altitude et la pente produits par Land. Et j'ai constaté des pentes indiquées à plus de 100%, jusqu'à 200% (jamais plus, ce doit être une limite logicielle pour que ça plafonne très exactement à +/-200%), qui ne correspondaient pas à des changements d'altitude.
J'ai isolé deux cas différents, avec deux explications différentes.
Premier cas :
Dans un autre fil, je détaille une anomalie rencontrée sur le GPS Twonav Cross lorsqu'on manipule les boutons : cela produit une impulsion anormale sur l'altitude enregistrée (surpression interne sur le capteur barométrique).
Dans cette situation, cette impulsion d'altitude s'accompagne d'une impulsion équivalente de la pente, le qu'on peut le voir sur ce graphique :

La corrélation est évidente, et somme toute "logique". Une correction de la courbe d'altitude efface/effacerait par la même la variation anormale de pente.
Deuxième cas :
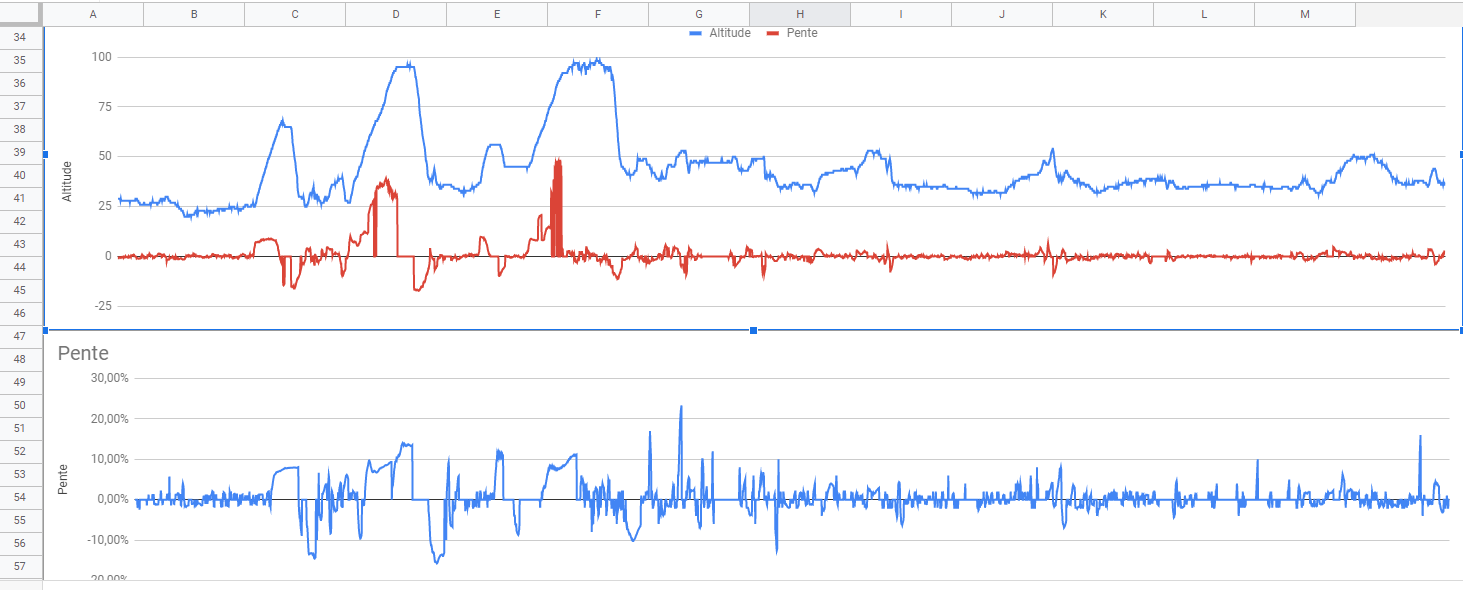
Dans ce cas, je trouve une variation de pente, sans anomalie concernant l'altitude, tel qu'on peut le voir ici :

La trace semble normale (ne pas faire attention à l'aspect "flouté" de la trace, c'est ma version macOS de Land qui bugue sur l'affichage pour cause non support du 3D et d'antialiasing depuis la dernière version de macOS).
Alors quoi ?
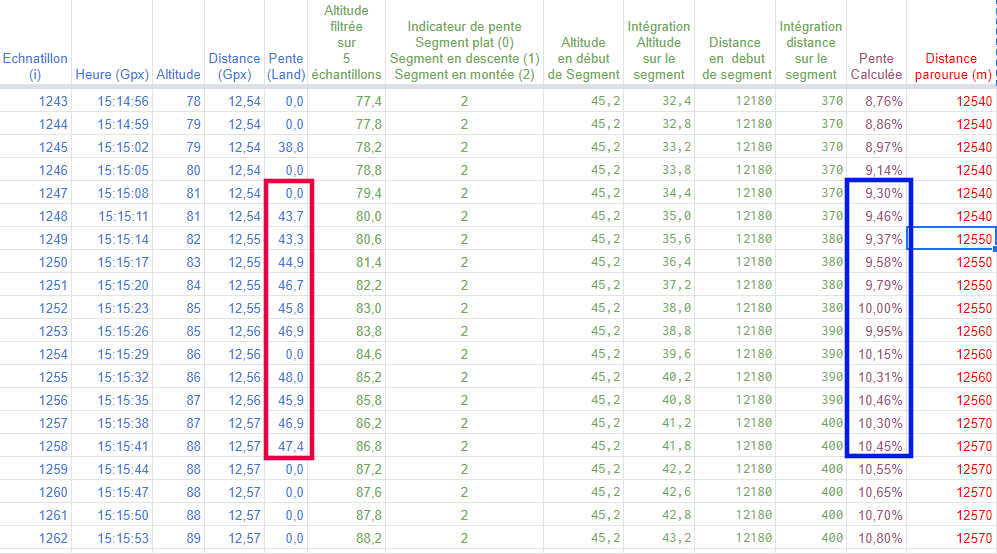
Ben non... la trace n'est pas "normale", il faut zoomer énormément dessus pour s'en rendre compte (ou bien analyser points par points le fichier TRK) :

On voit le niveau de zooming en bas à droite de la capture. En fait, à l'endroit de l'indication de pente aberrante, la trace présente un "twist" (qui ne correspond qu'à quelques points seulement). Cela peut être du à une perte temporaire de qualité de réception, mais aussi à un rapide tour sur moi-même pour parler à quelqu'un tout en marchant, à un dépôt du sac à terre le temps de faire autre chose, ...
Ce qui est certain, c'est que Land indique un changement de pente monstrueux sans variation d'altitude, ce n'est pas normal ! De toute évidence, l'algorithme de calcul de pente a des difficultés à gérer les changements brusques de direction. Je ne montre pas d'autres captures d'écrans, mais sur cette seule trace, j'ai une bonne dizaines de cas identiques, croyez-moi. Et donc des statistiques concernant la trace brute erronées.
C'est bien un problème du à Land (en fait, le même souci existe sur le firmware des GPS qui indique aussi des pentes à 200%, même si on n'a pas le graphique correspondant sur le GPS). Pour s'en convaincre, voir cette trace :

Même souci, et la source n'est pas un fichier TwoNav .TRK, mais un fichier NMEA provenant d'un smartphone. C'est donc bien la traitement logiciel de la trace par Land qui est en défaut, mais pas l'enregistrement lui-même. Ici, en zoomant sur la trace, on obtient également un twist, auquel on ne faut pas attention sur une vision plus macroscopique du tracé :

En conclusion (forcément provisoire et partielle), je dirais :
- il n'y a pas de problème matériel avec ces pentes anormales, c'est "juste" un problème logiciel (c'est déjà ça !) ;
- cela montre, si on n'en était pas encore convaincu, les limites des statistiques temps réels faites sur les enregistrement par le GPS, elles sont forcément entachées d'erreur dues à des relevés moins précis. En particulier, les valeurs maximales et minimales de certains paramètres sont forcément inexactes !
- cela montre qu'il est nécessaire pour une exploitation cohérente des traces de les "nettoyer" de tout ce qui est aberrant, hors cohérence avec la géographie du lieu ou la physiologie et les capacités physiques de l'utilisateur.
- il est inadapté de réaliser certaines statistiques, mesures, ..., a des fréquences étrangères aux conditions physiques : même si on enregistre à une fréquence élevée (1hz, un point par seconde), il est/serait nécessaire que le firmware en amont effectue un filtrage pour supprimer le bruit du paramètre mesuré. Et le traitement logiciel doit/devrait avoir des vérifications de cohérence : afficher une pente à 200% quand l'altitude de varie pas, cela devrait provoquer une élimination de la mesure jugée non-conforme par exemple.
Voilà... encore une proposition d'amélioration et de travail que je fais aux développeurs TwoNav,
Bien cordialement,
-

Re bonjour,
Peut-être que Bernard a confondu "distance calcul de pente" avec "altitude minimale pour accumuler" ?
C'est ce paramètre "distance calcul de pente" qui sert à calculer la pente affichée.
On peut supposer que la valeur de la pente en % doit, à peu de choses près, ressembler à quelque chose comme:
((altitude du point "Y" - altitude du point "X") / distance sur la trace entre X et Y) *100
(le point Y étant le plus proche point de la trace situé à "distance calcul de pente" de X)
Plus on diminue ce paramètre, plus le résultat est imprécis, à cause des erreurs de positionnement du GPS. (c'est la distance entre 2 points qui intervient ici).
-

Bonsoir,
Je ne voudrais pas jouer les "agaces-culs" hors sujet, mais, Il y a quelques temps, dans un de mes posts, il était écrit un truc du genre : " Land 7 n' pas pris une ride et est meilleur sur certains points que Land 8" (ce n'est pas de moi mais du site TwoNaviste). Sur ce, les Utilisateurs de Land 7 se sont fait un peu "malmenés".
Aujourd'hui, je lis: "Merci ca montre que c'est une "dégradation" des versions récentes de Land."
Puis,
Que vient faire Excel ici ?
Ca allait venir.
Rectification: c'est venu: obtenue avec Google Sheets (L'Excel gratuit).
Bonne nuit à tous et toutes
-

Bonjour,
"C'était mieux avant"...!
En étant juste pragmatique et concret, pour ceux et celles qui ont un GPS "né" avant Land 8, rester dans une version antérieure a Land 8 n'est pas possible ou difficile.
A partir de là la question de passer au delà de Land 8.0 ne se pose plus.
Ex L'appli en 5.x n'est reconnue par Land qu'au de la de 8.9.x, le CROSS c'est "de mémoire" 8.9.2.
Excel ou Google Sheets c'est la même chose.
Le truc qui était mieux avant c'est un éternel débat, il a lieu pour tout.. Certains regrettent la queue ou la journée aux impôts pour un échange de 5 minutes alors qu'internet permet de tout traiter en temps masqué.
De mon point de vue, la "geguerre" ne se situe pas entre Land 7 et Land 8. La problématique majeure est probablement au niveau de l'équipe d'ingénierie de CompeGps. Le "management" a dut adhérer aux "belles idées" qui on prévalut il y a quelques années (délocalisation, dispersion des équipes, etc...) ce qui a du faire fuir les bons, maintenant suite à la relocalisation (partielle ou totale ?) "ca rame" pour récupérer les indispensables compétences (Sous traitance, Intérim, Stages, etc..).
De toute évidence comme la évoqué Bernard, il y a un gros manque au niveau qualité (Test de non régression, etc.), il faut surveiller de près, la nouvelle version de Land, voir s'ils vont corriger la litanie des bugs, qui compliquent gravement l'utilisation de 8.9.6. Le seul point positif vu dans cette version c'est la stabilité, il me semble que les crashs ont disparut dans la version 64 bits.
Un autre exemple caricatural mais révélateur, depuis la nouvelle génération de GPX (OS Unbutu) lors de raccordement au PC un message d'erreur monte, dans la version 5.0.4 c'est réputé corrigé, effectivement il n'y a plus un message d'erreur mais il y en a deux successifs.. Ca n'a pas été suffisamment testé!
Cdlt
-
Bonjour,
NON, ce n'était pas mieux avant.
Comme je l'ai déjà dit, j'ai plusieurs versions de Land car avec certaines une fonction est mieux ou non.
Il faut une ou des versions (pas de trop car le downloader est perdu dans ce cas) qui vous vont.
Land 7 est meilleur sur certaines et si ce sont celles que l'on utilise le plus, on le garde. Eventuellement en plus d'une version communiquante avec votre GPS.
Excel ou Google Sheets c'est la même chose.
J'ai bien compris cela mais vous ne vous mettez pas à la portée de l'utilisateur moyen et quand, vous (les cracks en GPS/informatique/intégration de puces GPS), demandez à cet utilisateur moyen de faire des tests, il est perdu devant vos beaux graphiques. Il ne sait pas comment vous les avez fait et ne fait rien. Donc, le nombre de "participants" aux tests est très réduit.
il y a un gros manque au niveau qualité
Cela fait 11 ans que je lis cela ! Et vous croyez que vous deux allez changer CompeGPS ?
Fin du hors sujet.
Désolé Mr Perrot.
Cordialement
-
Mouais..
Bernard a souhaité qu'un possesseur d'un GPS CROSS fasse la manip d'appui sur les boutons, c'est à mon sens déplorable en regard des efforts qu'il a produit au bénéfice de la communauté des utilisateurs, que pas un seul possesseur d'un GPS CROSS n'ai abondé dans son sens.
C'est pourtant simple (même avec un seul neurone on doit y arriver), faut croire que chez certain d'entre nous c'est trop demander!
Il suffit de le poser sur une table, de lancer un enregistrement, et de presser les boutons puis de faire stop (récupérer la trace est automatique) ensuite il suffit de visualiser le graphe des altitudes avec Land ou de mettre le lien vers la trace dans le CLOUD (un simple clic sur un bouton dans le CLOUD) .
Excel n'a rien a voir la dedans, de plus Bernard n'a jamais mis ni demandé de graphe Excel!
C'est tout simplement irrespectueux, surtout pour UN utilisateur tout particulièrement!
CDLT
-
Bonjour,
C'est bien un problème du à Land (en fait, le même souci existe sur le firmware des GPS qui indique aussi des pentes à 200%)
@Bernard
Avez-vous esayé cette trace sur votre Anima, lequel a un TwoNav différent du Cross ?
Et pouvez-vous mettre un link vers votre trace ?
Cordialement
-
Bonjour,
"...s'est senti "mal" par mes propos..."
Pas de problème, aucun malaise.
S'il nous arrive de dépasser un peu les bornes de la politesse ou la convivialité, cela prouve juste qu'on est tous passionnés ici.
On ne cherche qu'à être positifs et productifs, on revient donc au sujet."Avez-vous esayé cette trace sur votre Anima, lequel a un TwoNav différent du Cross ?"
Ah non tiens... bonne idée, le temps de recharger la batterie et je teste ça.
"Et pouvez-vous mettre un link vers votre trace ?"
Un link d'une trace brute, non, par mail perso si vous voulez.
"((altitude du point "Y" - altitude du point "X") / distance sur la trace entre X et Y) *100
(le point Y étant le plus proche point de la trace situé à "distance calcul de pente" de X)"Oui, cette formulation simplifiée me semble correcte en première approche.
Le souci, c'est qu'avec une telle formulation, on se rend bien compte que si la distance entre X et Y est (quasi)fixée, que ce soit d'ailleurs 5m, 50m ou plus, il faut pour obtenir des pente supérieures à 100%, voire 200%, un différentiel d'altitude très important aussi. Hors, dans les exemples que je donne, le différentiel d'altitude est inférieur un 1m ! Avec 5m de "distance de calcul de pente", on semble buter à 200%, la valeur exacte n'est pas exploitable, avec 50m, je trouve encore une pente à 88%. Il faudrait donc une variation d'altitude d'environ 44m, ce qui n'est pas le cas puisque moins de 1m.
C'est là qu'on se dit qu'il y a quelque chose qui cloche... l'algorithme doit être plus complexe, et rencontre un problème quand il y a des "twists". Sans connaitre cet algorithme, on peut disserter longtemps, mais on ne convergera sans doute pas sauf à simplement constater qu'il y a un souci, et qu'il est nécessaire de "nettoyer" la trace avant de l'exploiter statistiquement. Ce n'est au fond pas un problème, puisqu'il y a des tas d'autres raisons pour nettoyer les traces. Juste qu'il convient d'être averti et très critique en lisant les statistiques instantanées sur les GPS et avant d'avoir fait ce travail de lissage avec Land.Land 7 vs Land 8 ?
Chacun fait comme il veut, pas la peine de s'étriper la-dessus.
Mieux ou moins bien, personnellement, Land 7 est désormais incompatible avec mon macBook, donc j'utilise Land 8. Et probablement qu'avec le temps, il deviendra aussi incompatible avec de futures versions de Windows. Il est plus important pour moi d'aider à améliorer Land 8 ou futur que se confondre en nostalgie sur les versions obsolètes en devenir d'obsolescence, qui de toute façon resteront en l'état.Cordialement,
-
"..l'algorithme doit être plus complexe.."
Le calcul de pente résulte probablement d'une équation de type ArcTGT (Vitesse Verticale/Vitesse Horizontale) en utilisant des vitesses filtrées (filtre numérique temps réel genre FIR ou équivalent) , car dans les cassures de pente à VTT c'est assez facile d'activer (ou de ne pas l'activer) l'alarme de pente en jouant sur la vitesse.
Gap d'altitude / Gap de distance ca fonctionne sur des valeurs établies, comme on le fait sur une carte, mais l'altitude variant (cf les gpx, en gros dans le GPX l'altitude varie toujours de 1 m) par pas de 1 m pour un randonneur qui se déplace entre 1 et 1,5 m par seconde (bruit gps 4 m) ce n'est pas possible de calculer une pente a 1 Hz, ont peut calculer la pente d'avant mais pas la pente instantanée. A VTT en montée ca roule rarement a 20 km/h, le constat sera similaire, a vélo au dessus de 20 Km/h (> 5 m/s) "on" commence a sortir du bruit du GPS les gaps d'altitude et de distance vont commencer a être utilisables. Donc soit l'algo filtre l'altitude et la distance mais ca entraine inévitablement un retard. Je penche plus sur l'utilisation des vitesses filtrées en dérivant la variation d'altitude et la variation de distance.
Cdlt
-
Avez-vous essayé cette trace sur votre Anima, lequel a un TwoNav différent du Cross ?
Alors, avec une trace récente :
- Land (v8.9.4.1) : pente maxi = 112%, pente mini = -200% (avec "distance calcul de pente" réglé à 5m)
- Anima (v3.3.6) : pente maxi = 132%, pente mini = -88% ("distance de calcul de pente" = 5m, "distance pente suivante" = 100m, de mémoire, jamais touché à ces paramètres)
- Cross (v5.0.4rc1) : pente maxi = 200%, pente mini = -200% (pas trouvé non plus de réglage de "distance de calcul de pente").Pas les mêmes valeurs, mais toutes absolument hors réalité.
NB :
Sur l'Anima, un deuxième paramètre "distance pente suivante" qu'on ne retrouve pas dans Land sauf erreur de ma part.
C'est curieux, c'est référencé dans le manuel du Cross comme un réglage possible dans la partie "champs de données", mais je n'ai pas trouvé le réglage... pas plus que le réglage "distance de calcul de pente".
C'est possible sur le Cross ? Peut-être uniquement dans le "gps.ini" comme d'autres paramètres ? -
("distance de calcul de pente" = 5m, "distance pente suivante" = 100m, de mémoire, jamais touché à ces paramètres)
Ce sont les paramètres par défaut d'un TN 3.3.4 Android. Sous TN 3.3.4 Windows, c'est 10 et 100m.
Pour avoir la pente suivante, il doit falloir naviguer avec un CDEM de chargé. (mais "j'enfonce une porte ouverte" qui a peu à voir avec le problème).
comme un réglage possible dans la partie "champs de données",
La possibilité d'afficher d'une donnée ne veut pas dire qu'on puisse la régler. C'est une information, un affichage. On peut afficher une distance restant à parcourir ou parcourue mais on n'a pas la main dessus, par exemple.
-
La possibilité d'afficher d'une donnée ne veut pas dire qu'on puisse la régler
Certes, mais en l'occurence, la notice du Cross dit :
(chapitre 6 -> annexe -> champs de données -> Altitudes) :
• Pente au suivant : pente jusqu’à la distance réglée pour le champ ‘Distance pente suivant’
ce qui laisserait supposer qu'on peut la régler puisqu'il est écrit "distance réglée"...Mais bon, c'est peut-être une mauvaise rédaction, ou un héritage pas corrigé d'une notice précédente étant donné que cette mention apparaissait dans la notice de l'Anima.
Et pour donc revenir au sujet initial : le Cross me donne des pentes à 200%, anormales, dans sa configuration par défaut ! Ce qui est le problème, le même que dans Land !
-
Venant de faire une reinitialisation à la config d'origine de Land 7.7 j'obtiens 100m dans le champ "Trace/Distance calcul de pente".
Il serait intéressant d'essayer dans Land:
- 1m et voir si le nombre de +-200% augmente
- 100m qui devrait faire disparaitre tous les +-200%Bien sûr il y a, indéniablement, un bug dans le calcul de la pente par CompeGps, c'est évident.
-
Bonjour,
Pour ma configuration 1m et 100 m c'est le paramétrage que j'utilise, pour les graphiques que j'ai visualisé.
Pour moi l'information essentielle est le constat que "ce bug" est depuis Land 8.0, qu'il n'existait pas avant. L'autre constat utile c'est que le bug semble disparaître sur une trace "prévue", la différence principale entre prévue et réalisée c'est le nombre d'échantillons.
J'ai des profils de traces avec des diagrammes d'altitude et de pente corrects, mais le plus souvent c'est diabolique.
Pour info Bug remonté a CompeGps plusieurs fois depuis plus d'un an.
Cdlt
-
Bonjour,
"ce bug" est depuis Land 8.0
Je confirme:
5m pour Distance calcul pente.
L'utilisation d'un Land 7 n'est pas de la nostalgie, c'est le choix de bons services rendus là où sont mes centres d'intérêts.
Cordialement
PS: Pour info, Land 772 pour windows est toujours dispo.
-
Bonjour,
Je confirme également l'introduction d'un bug (de plus ?) dans le calcul de pente, entre Land 7.7 et Land 8.xx.
Par ailleurs, j'insiste sur le fait qu'il n'est pas normal de régler "distance calcul de pente" à une valeur aussi faible que 5m. La précision de nos gps/baromètre n'est pas suffisante pour avoir des valeurs de pente correctes avec ce réglage.
Supposons que l'altimètre nous donne une erreur d'altitude de +-1m par exemple, ce qui est fort possible.
L'erreur induite sur la valeur de la pente entre 2 points espacés de 5m sera de 1m/5m soit 20%.
Ce qui signifie que si la pente réelle est de 10% par exemple, la valeur indiquée sera entre -10% et +30%.En réglant la valeur sur 100m (valeur par défaut) la même erreur d'altitude de +-1m donnera une erreur de 1m/100m soit +-1% "seulement".
Ce qui, pour la même pente de 10%, donnera une valeur entre de 9% à 11%, ce qui est acceptable me semble-t-il.Il est utopique avec nos appareils, de vouloir mesurer une valeur de pente sur une aussi courte distance que 5m.
Sportivement
-
Re bonjour,
...Mais reste à savoir en fait comment est utilisée cette valeur. Est-ce la fenêtre de moyenne sur la distance horizontale ou bien le dénivelé minimal pour entreprendre un recalcul ?
La pente d'un trajet peut se calculer sur différentes valeurs de distance, et c'est la valeur "distance calcul de pente" qui fixe cette valeur. Ce n'est pas une valeur de dénivelé, mais bien la distance entre 2 points, entre lesquels on veut calculer la pente.
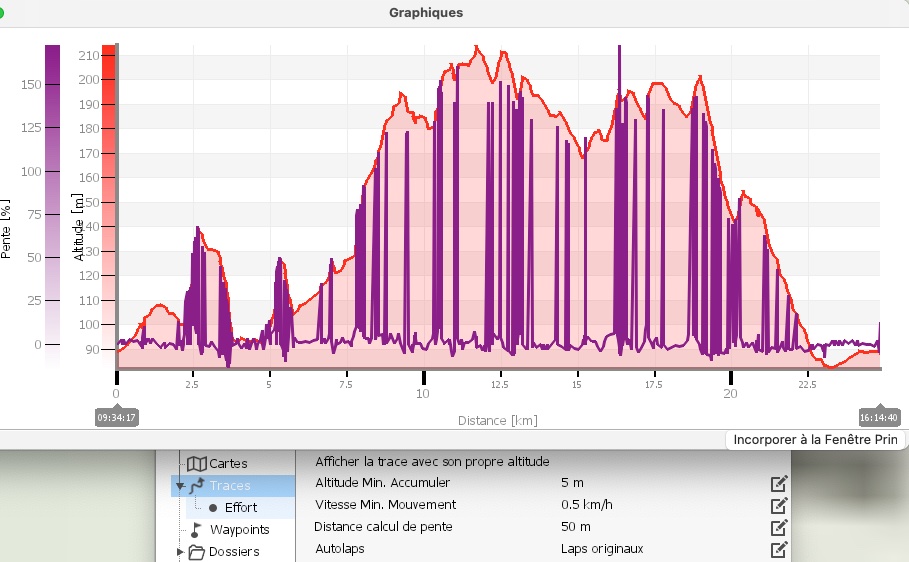
Par exemple pour la montée d'un col à vélo, on peut avoir un calcul de la pente tous les 1000m comme ici:
 ou tous les 200m (environ), comme ici:
ou tous les 200m (environ), comme ici:
Sportivement
-
Re Bonjour,
Au sujet des valeurs de "distance calcul de pente" et "distance pente suivante" dans les GPS (info concernant l'Anima, n'ayant pas de Cross)
Il y a 2 paramètres dans la config: Config complète/Navigation/Pente
- Distance calcul de pente = 0 (par défaut)
- Distance pente suivante = 200 (par défaut)Je ne sais pas lequel correspond à "Distance calcul de pente" de Land, malgré le côté évident de la chose, rien n'est sûr.
Pour "Distance calcul de pente", si on modifie la valeur, ça semble le faire, mais la modif est perdue, comme on peut s'en apercevoir en essayant de la remodifier: c'est toujours = 0 ... bug ?
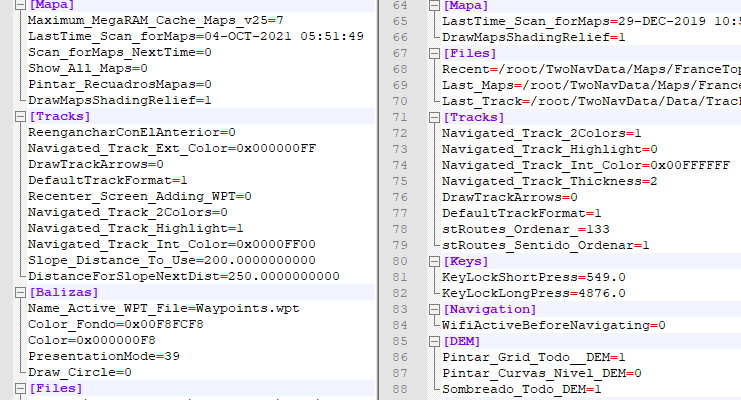
Ce paramètre existait bien dans le GPS.INI du Sportiva2 ver 3.2.1. Il se nommait "Slope_Distance_To_Use=....... " , semblait fonctionner correctement, et avait la même fonction que celui de Land.
Pour "Distance pente suivante", si on modifie la valeur, ça le fait, et la valeur est bien modifiée.
C'est dans GPS.INI au label: "DistanceForSlopeNextDist=.......... " -
Les recherches continuent...
Si l'on rajoute dans le GPS.INI de l'Anima (je suis resté à la 3.2.1), dans le paragraphe [Tracks], le paramètre: "Slope_Distance_To_Use=........." il est pris en compte pour le calcul de pente, avec la même fonction que "Distance calcul de pente" de Land.
Réglé à 100m "Slope_Distance_To_Use=100.0000000000" les valeurs de pente d'une trace sont normales.
Réglé à 1m "Slope_Distance_To_Use=1.0000000000" ça donne un peu n'importe quoi pour les valeurs de pente ...comme pour Land.C'est donc bien un bug:
- le menu de l'Anima propose de modifier ce paramètre "Distance calcul de pente" mais ça ne fonctionne pas, c'est toujours 0m qui est affiché.
- si l'on rajoute le paramètre "Slope_Distance_To_Use=100.0000000000" dans le GPS.INI [Tracks] , sa valeur est bien prise en compte pour le calcul de la pente.On peut se demander ce qui se passerait pour le Cross en ajoutant dans le GPS.INI [Tracks] "Slope_Distance_To_Use=100.0000000000" ... en regardant la pente d'une trace ? paramètre ignoré (probablement), ou pris en compte (miracle) ?
-
Différence du GPS.ini entre TwoNav 3.x et TwoNav 4.x
De mon point de vue le besoin entre Land et TwoNav n'est pas exactement le même, avec Land c'est la pente APRES pas PENDANT.
Donc dans Land le logiciel connait le profil de tous les points de la trace c'est relativement facile de calculer une pente correct, il suffit de prendre deux points espacés de x mètre devant et derrière chaque point.
Dans le GPS ce qui m'intéresse principalement, c'est ce qui se passe devant moi c'est a dire la pente instantanée ou celle à venir.
Si le GPS est en mode suivi d'une trace "ON" se retrouve dans la situation de land (ex faire le calcul entre deux points espacés de 100 m autour de la position actuelle), sauf pour les puristes!
En mode libre c'est plus complexe vu que le futur est inconnu, il n'y a que l'utilisation des vitesses pour présenter une solution viable.
En mode suivi de route (mon préféré) c'est relativement facile vu que l'altitude du WayPoint est connue . Je privilégie le dénivelé a avaler à la pente et ca fonctionne correctement.
Partant de ce constat, le concepteur est tente de n'utiliser qu'un algorythme, celui du mode libre qui fonctionne aussi pour ses copains.
Avec une position GPS précise à 4,5 m (Pour prendre les données officielles du cas le plus favorable) un pas de calcul de 100m c'est une position réelle entre 93,5 et 104,5m soit +/-9m, "grosso modo" 10% d'erreur sur la distance (50 m ca va doubler!), le bruit sur l'altitude sur les capteurs baro de nos GPS c'est +/- 1 m, donc dans le cas d'une pente de 10% (9 ou 11m) computée sur une distance de 100m "a la louche" la précision maximale sera de l'ordre de 3% (7 à 13%).
CDlt
-
Re bonjour,
Ok Thierry, à peu près d'accord avec tout ça.
Pour ma part, j'utilise la valeur de la pente uniquement à vtt, et la plupart du temps je ne suis pas en mode suivi de trace, et j'ai donc la valeur de la pente des 50 ou 100m derniers mètres parcourus affichée sur mon Anima.
Avec la remarque qu'avec TwoNav 3.2.1 du Sportiva, à mon souvenir, on peut changer la valeur de "Distance calcul de pente", soit "Slope_distance_to_use", à partir du menu de l'appareil, alors que ce n'est pas possible avec l'Anima, à cause d'un bug. Il faut le faire à partir d'un PC.
cdlt
-
Bonjour,
... le besoin entre Land et TwoNav n'est pas exactement le même, avec Land c'est la pente APRES pas PENDANT.
oui et non.
Lorsqu'un GPS crée une trace, en mode libre, c'est bien sûr la pente AVANT puisqu'il ne sait pas ce qui va venir après.
En prenant "distance calcul de pente" = 100m par exemple, il va calculer la pente sur les 100m précédents pour l'afficher en temps réel sur l'écran dans un champ "Pente".Par contre, une fois la trace enregistrée, ou si l'on charge une autre trace, il se trouve dans la même situation que LAND. Tous les points AVANT et APRES sont connus.
Que fait-il alors pour chaque point: calcul de pente avec les 100m précédents, les 100m suivants, 50m avant et 50m après ?
je ne sais pas...Cordialement
-
Bonjour,
Assez facile a "voir" quand on passe un col ou une crête...
S'il utilise la pente sur le trajet de 100 m qui à précédé le col, en début de descente à 20 km/h ( environ 5 m/s) il y aura un retard de 100/5 = 20 secondes (plus le temps de traversée système : Calcul + affichage) avant que la pente indique la pente correcte de descente. Or le retard est de l'ordre de 2 secondes ca se voit facilement quand on affiche la pente sur un passage de crête ou un passage de creux.
La pente c'est Delta Z (différence d'altitude) / Delta D (différence de distance) entre deux points, pour la démonstration qui suit si on considère une vitesse constante sur ce parcourt, Delta Z / temps = Vitesse verticale et Delta D / Temps = Vitesse horizontale par conséquent (Vz / Vh) c'est aussi l'image de la pente instantanée (bien entendu il faut filtrer / lisser les vitesses sinon la pente va varier au rythme du coup de pédale!
Mon hypothèse est que c'est probablement ce type d'équation qui est mis en œuvre, pour deux raisons, la première c'est le retard d'environ 2 secondes au passage des ruptures de relief (Soit 10 m a 20 Km/h), et la réaction de l'alarme de pente.
Au début de TN 5.x (4.6 a l'époque) j'ai testé cette fameuse alarme de pente et constaté qu'en jouant sur la vitesse je pouvais l'activer ou non pour un même profil vertical, depuis je n'ai pas refais ce test.
Concrètement, en franchissant une cassure de pente lentement l'alarme calée sur -15% par exemple (pour une pente a -10%) ne "couinait" pas, en augmentant la vitesse au passage de la cassure l'alarme retentit. Si on raisonne en H/D les deux profils sont identiques, si on raisonne de Vz / Vd l'observation de ces vitesse dans une même fourchette de temps va influencer le calcul de pente. Il y a eu bcp de "plaintes" au début, sur l'affichage par le GPS d'une pente "fofolle", puis il y a eu deux corrections, depuis ça semble corrigé dans les GPS la présentation de la pente est correcte a priori, ils ont probablement amélioré le filtrage / lissage des vitesses, ou changé l'algo de filtrage numerique.
Dans le GPS pour un trajet réalisé, le GPS peut travailler avec les vitesses, d'ailleurs pour les GPS récent il n'y a plus de paramétrage du calcul de pente dans la configuration (contrairement a TN 3.x). Pour Land, si "on" veut avoir la pente sur une trajectoire "prévue" donc sans vitesse il faut obligatoirement utiliser Delta Z et Delta D, de plus Land connait le profil vertical du début a la fin, donc relativement facile de calculer la pente avec H/D. Le GPS lui ne peut pas toujours savoir ce qu'il y a en aval du circuit.
Cordialement
-
Bonjour,
Pour clôturer le sujet...
C'est une trace enregistrée par le GPS (TwoNav 5.0.4)
En haut (bleu) le profil vertical, dessous en rouge la pente calculée par Land (La pente n'est pas incluse dans le fichier issu du GPS)
En bas en bleu, le calcul correct de la pente (Excel ou Google Sheets), désolé pour ceux et celles qui ne "cause" pas couramment l'Excel, ce qui est intéressant d'observer:
- Les "folies" de la courbe de pente de Land ont disparues,
- Le "pic" a 23% et les "otres" sont vérifiés c'est correct
- Ce calcul l'équation exploite l'altitude (filtrée à 0.2hz pour éliminer le bruit du capteur) et la distance issue du GPS, il fonctionne est utilisable (donc il produit le même résultat) en instantané et sur un itinéraire aboutit.
Cdlt
-
Bonsoir,
Tiens, un constat pour alimenter la discussion à propos du paramètre "distance de calcul de pente", avec l'impression que si on l'augmente, on réduit la pente, et en particulier les artefacts.
Ben pas forcément...
Voici deux graphiques, avec un paramétrage à 5m, et 50m. Je visualise sur la même capture le paramètre et le graphique (j'ai relancé Land après changement de paramètre) :

Je précise que c'est une trace "nettoyée", plus aucun twists, bien propre !
Quelques "pics" entre 30% et 50% de pente avec un paramètre à 5m, et une multitude de pics jusqu'à 175% avec paramètrage à 50m !!!
On constate qu'avec 5m, le graphique de pente est plus "bruité", c'est assez compréhensible, mais si avec 50m il est plus "stable", il est plein de pics incompréhensibles.La trace, du point de vue cap/direction, c'est "monotone", sans à coups, l'altitude est barométrique, avec en réel de faible variations.
C'est un vrai truc de fous...
Cordialement,
-
c
Bonjour,
Sur ce sujet du calcul de pente, il y a un autre élément à signaler.
Ce qui suit se rapporte à l'Anima. Les possesseurs de Cross, Trail ou Aventura pourront dire si le comportement est semblable, ou si ce défaut a été corrigé depuis.
Le défaut consiste en un décalage de 20 à 30 secondes entre la mesure de l'altitude barométrique et son affichage.
On peut s'en rendre facilement compte en affichant l'altitude barométrique dans une page de donnée, et aussi ensuite, en regardant la valeur de l'altitude dans la trace correspondante.
Pour mettre le défaut en évidence, il faut monter une pente de 10% par exemple à une vitesse de 20km/h au moins, et s'arrêter pile-poil au point haut.
A l'arrêt, on va voir l'altitude continuer à monter pendant 30 secondes environ, jusqu'à atteindre la vraie valeur.Evidemment la valeur de la pente est fortement perturbée par ce décalage: à l'arrêt on continue à monter alors que la distance est nulle!!!
Suit un exemple d'une pente régulière à 8% environ, de 450m de long, parcourue à 21km/h.
Le premier graphique nous donne pour une "distance de calcul de pente" = 50m une pente max de 20%.
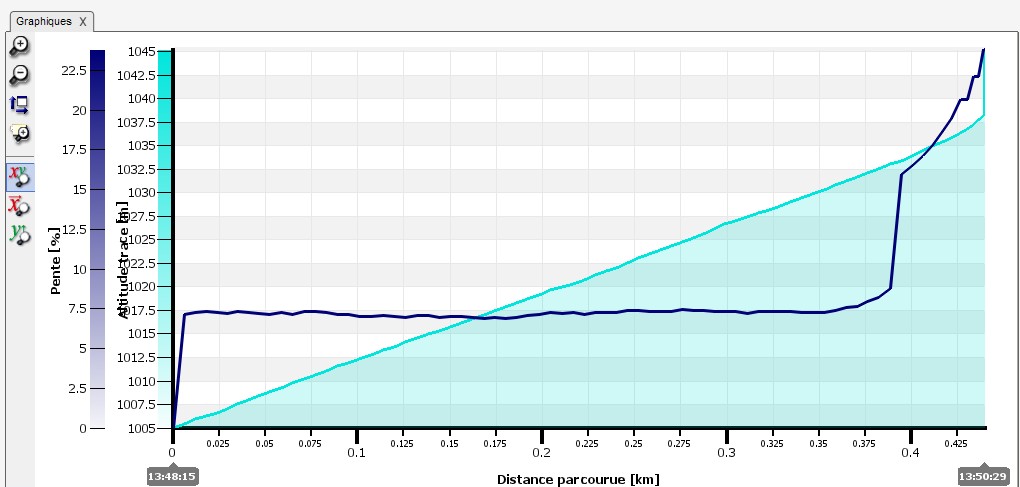
Le deuxième, pour une "distance calcul de pente" = 5m, une pente max de 128% !!!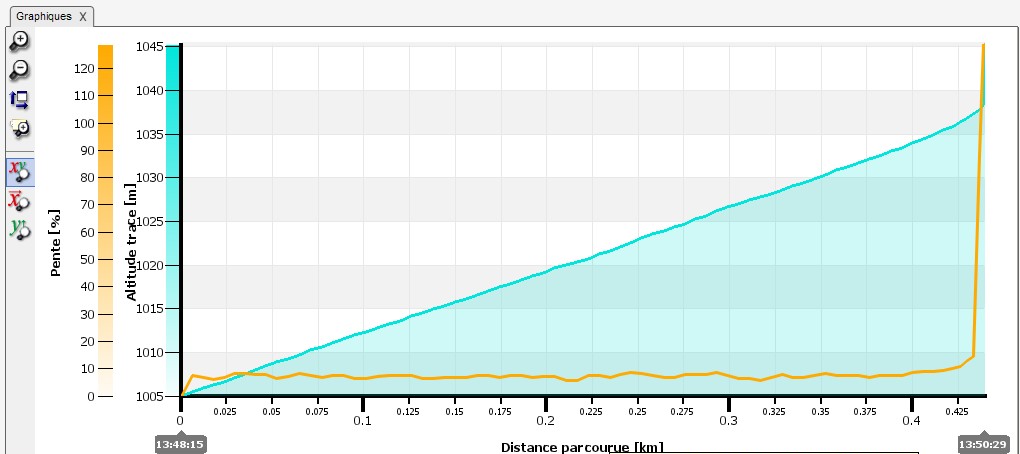
On peut voir sur les 2 graphiques la remontée d'environ 7m alors que l'on est à l'arrêt.
Je n'ai pas atteint les pentes de 200% constatées par Bernard P. mais je pense pouvoir y arriver facilement avec une pente ou une vitesse un peu plus élevée, ou mieux dans une descente.
Cependant ça ne semble pas être le même problème, mais seulement un autre problème du calcul de pente chez TwoNav.Sportivement
-
Bonjour,
Cependant ça ne semble pas être le même problème
Non, je ne pense pas.
Dans les exemples que je donne au début, l'un d'eux utilise une trace enregistrée sur un smartphone, avec altitudes issues d'un fichier MNT. Donc, rien à voir avec l'inertie indiquée ici du capteur barométrique. Cela semble être un autre sujet.
Un noter et repréciser : les pentes jusqu'à 200% que je signale au début de ce fil de discussion sont des "impulsions", avec retour à la valeur normale (en général zéro car pour des pentes réelles nulles ou infinitésimales) après quelques secondes.
Cdlt,
Bitte melden Sie sich an, um einen Kommentar zu hinterlassen.
Kommentare
60 Kommentare